PRÁCTICA III
Configurar
el funcionamiento de una cinta transportadora mediante un variador conectado a
Profibus-DP de la siguiente manera:
- Al accionar el pulsador de marcha arrancaremos la cinta al 25% de la velocidad del motor.
- Al detectar un sensor el elemento que transporta la cinta, el motor acelerará hasta el 100% de su velocidad.
- Al llegar la pieza al final (detectado por otro sensor), motor parará durante 10”, para posteriormente invertir el sentido de giro del y funcionando a la velocidad del 50% del motor, deteniéndose la cinta cuando la pieza vuelva a ser detectada por el primer sensor.
- El estado de la cinta transportadora estará en todo momento señalizado por lámpara (una para el paro, otra para la marcha, una para cada sentido de giro, y una para cada velocidad distinta del motor.)
Las entradas que controlan la cinta transportadora estarán
ubicadas en un módulo de periferia descentralizada o autómata programable (el
que se desee). El estado de la cinta transportadora se visualizará desde el
autómata maestro.
ESCLAVO
MICROMASTER

Se trata de un variador de velocidad de la marca Siemens al que se le ha añadido un módulo para hacer posible la comunicación y control vía Profibus.

- A través del los interruptores del DIP1 podemos configurar la dirección de red del variador, pero como no queremos que se rompa por uso excesivo se ha optado por dejarlo asignado siempre con la dirección 6.

- Nosotros utilizaremos el PPO3 que es el más sencillo, así que enviaremos y recibiremos del variador 4 Bytes, divididos en PZD1 y PZD2:
- PZD1 (Byte 0 y Byte 1) --> Palabra de control. Esta palabra determina como debe de comportarse el variador. Cada uno de los bits que la componen indicará un estado del mismo.
- 447E --> Es el primer valor que debe recibir para poder estar preparado para arrancar a través de comunicaciones. Además es la palabra de control para la parada normal.
- 447F --> Sentido de giro a derechas.
- 0C7F --> Sentido de giro a izquierdas.
- 447D --> Parada en rueda libre.
- 447B --> Parada rápida.
- PZD2 (Byte 2 y Byte 3) --> Consigna de frecuencia. En esta palabra se indica en hexadecimal el valor de consigna de frecuencia al que deseamos que marcha el variador.
- #0000 --> Valor de frecuencia 0Hz (0% de la velocidad nominal del motor)
- #2000 --> Valor de frecuencia 25Hz (50% de la velocidad nominal del motor)
- #4000 --> Valor de frecuencia 50Hz (100% de la velocidad nominal del motor)
- Con estos datos ya tenemos suficiente para manejar el variador de forma correcta desde nuestro maestro.
ESQUEMA DE TRANSMISIÓN ENTRE EQUIPOS

- Al maestro se le ha asignado la dirección 2, que es la primera disponible en la red, ya que la 0 y la 1 están reservadas por el sistema. Para el variador se le ha asignado la 6 por convenio en clase para no estropear los microinterruptores de selección de dirección.
- En esta práctica y por el perfil utilizado PPO3, el variador sólo recibe 4 Bytes de entrada.

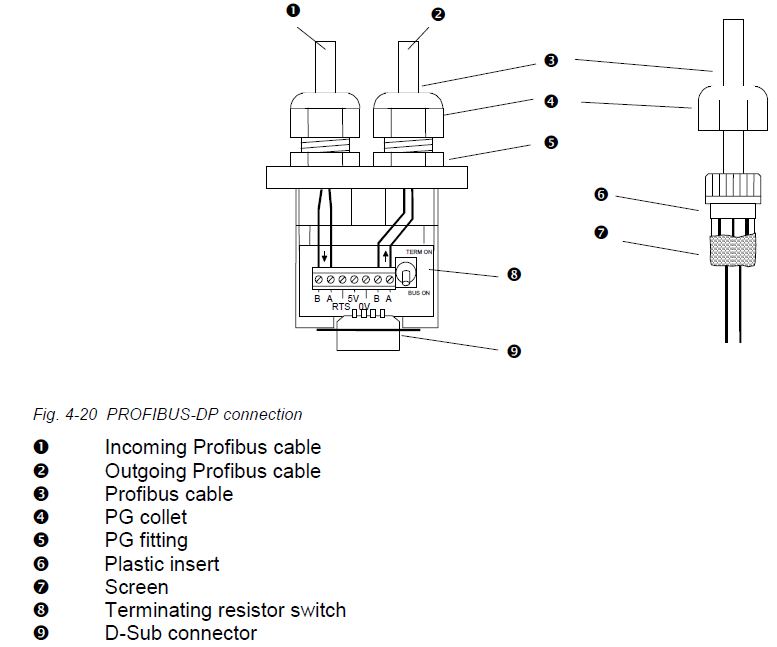
- En esta conexión al tener solo dos equipos solo necesitamos un cable y ambos interruptores de terminación de bus deberán estar a ON.
FLUJO DE TRANSMISIÓN DE DATOS

DISTRIBUCIÓN DE DATOS EN LA MEMORIA DEL MAESTRO
Para esta práctica el módulo CP342-5 escribirá y leerá los datos en la siguiente área de memoria y con la siguiente distribución:
 Nos centramos solo en el envío de información pero también podríamos leer aunque leeríamos los mismos valores que hemos enviado y para el desarrollo de esta práctica no nos interesa, estaría más orientado hacia sistemas SCADA.
Nos centramos solo en el envío de información pero también podríamos leer aunque leeríamos los mismos valores que hemos enviado y para el desarrollo de esta práctica no nos interesa, estaría más orientado hacia sistemas SCADA.
Así que como podemos observar en la distribución de la memoria en el MW0 cargaremos la palabra de control y en el MW2 cargaremos la consigna de frecuencia, ambas en hexadecimal.

Así que como podemos observar en la distribución de la memoria en el MW0 cargaremos la palabra de control y en el MW2 cargaremos la consigna de frecuencia, ambas en hexadecimal.
DESCRIPCIÓN DEL PROCESO DE COMUNICACIÓN
- Debemos de cargar en MW0 la palabra de control que nos permite arrancar a través de comunicaciones, así que cargaremos 447E.
- Queremos que empiece girando a derechas así que cargaremos en MW0 el valor 447F y queremos que lo haga al 25% de su velocidad así que en MW2 cargaremos el valor 1000.
- Cuando se active un sensor de presencia, representado por la entrada E125.7 del maestro, cargaremos en MW2 el valor 4000 para que siga girando a derechas pero lo haga al 100% de su velocidad.
- Cuando otro sensor de la señal de que la pieza ha llegado al final, representado por la entrada E125.6 del maestro, el motor se detendrá durante 10 segundos por lo que cargaremos en MW0 el valor 447E, transcurridos esos 10 segundos arrancará en el sentido contrario al 50% de su velocidad por lo que cargaremos en MW0 el valor 0C7F y en MW2 el valor 2000 para que gire a izquierdas al 50%.
- Cuando el primer sensor vuelva a detectar la pieza, E125.7, el motor se detendrá y para ello cargaremos en MW0 el valor 447E.
- Así mismo tendremos salidas activas en el maestro en función del estado:
- A125.0 --> luz de motor parado
- A125.1 --> luz de motor en marcha
- A125.2 --> luz de giro a derechas
- A125.3 --> luz de giro a izquierdas
- A125.4 --> luz de velocidad al 25%
- A125.5 --> luz de velocidad al 50%
- A125.6 --> luz de velocidad al 100%
CONFIGURACIÓN DEL MAESTRO S7-CPU314IFM
- Abriremos un nuevo proyecto donde configuraremos un equipo maestro como hicimos en la práctica anterior, consultar la entrada del blog "Profibus DP, Practica I" para más información. Nos paramos cuando ya tenemos configurado el Maestro con el módulo CP342-5 y la red Profibus creada:

- Añadimos el variador Micromaster 420 como esclavo de la red Profibus, lo podemos hallar en el menú lateral derecho bajo la entrada "Profibus_DP -->Simovert-->Micro/Midimaster OPMP":

Lo configuramos con la dirección 6 que ya viene asignada por HW como hemos mencionado anteriormente.
- Ahora tenemos que cargar en el esclavo la configuración PPO3 que es la que vamos a utilizar, por ello arrastramos el módulo PPO3 del menú lateral hasta el slot 1 del variador ya que en el slot 0 hay que cargar el "modulo universal" para un correcto funcionamiento del variador. De esta forma ya estará la configuración del esclavo terminada.

- Vemos como tiene 4 Bytes para las entradas y 4 Bytes para las salidas, pero nosotros solo vamos a utilizar los bytes de entrada, ya que solo queremos enviarle el PZD1 y PZD2.
- Una vez terminado el apartado de configuración del hardware podemos pasar a escribir el programa:

- Para esta práctica sólo nos hace falta usar la función DP_SEND ya que solo queremos enviar información al variador.
- Podemos observar como la dirección CPLADDR sigue siendo la misma que en la práctica anterior ya que el módulo CP342-5 lo hemos vuelto a colocar en el slot 4.
- Pero ahora solo enviamos 4 Bytes contando desde el M0.0.
- Comenzamos a mandarle instrucciones al variador:

- Al actuar sobre el pulsador de arranque del variador, entrada E125.1 del maestro, se coloca la palabra de control 447E en la zona de envio MW0 que corresponde con la zona de memoria del variador PZD1 para poder arrancar a través de comunicaciones.
- Acto seguido el motor deberá girar a derechas, enviamos de nuevo a la zona de memoria MW0 el varlo de giro a derechas 447F y ahora añadimos la velocidad a la que queremos que gire moviendo al área de memoria MW2 el valor en hexadecimal 1000, que corresponde con un 25% de la velocidad nominal del motor.

- Si se actúa sobre el pulsador de paro el variador recibirá la palabra de control 447E y dentendrá el motor.

- El primer sensor al detectar la pieza mira cual es la última palabra de control enviada al variador, que se encuentra en MW0, si ve que el variador está girando a derechas, valor cargado en MW40 activa la marca M20.0 y si el motor esta girando a izquierda, MW42, se activará la marca M20.1

- El primer sensor detecta la pieza y el maestro ha comprobado que el motor esta girando a derechas, por tanto acelera el motor hasta el 100% de su velocidad nominal cargando la palabra 4000 en el MW2 que es la zona de memoria que se envía al variador que coincide con la zona PZD2 y por tanto el variador hará que el motor acelere.

- Cuando llega la pieza al sensor final, E125.6, este se activa un instante y lo capturamos mediante la activación de la marca M20.2.
- Esta marca desencadena que se mueva la palabra de control 447E al word MW0 para ser enviada al variador y a la vez activa un temporizador de 10 segundos.

- Al cumplirse los 10 segundos se carga la palabra de control 0C7F en la palabra MW0 y la consigna de velocidad 2000 en la MW2 para que el motor comience a girar a izquierdas al 50% de su velocidad.
- Se resetean las marcas M20.0 que había activado el primer sensor y la M20.2 que ha activado el sensor del final.

- El primer sensor detecta la pieza y comprueba hacia que lado esta girando el motor, como en esta ocasión está girando a izquierdas activa la marca M20.1, que hace que se cargue la palabra de control 447E en la zona PZD1 del variador, deteniendo el motor.
- Una vez hecha la carga se resetea la marca que activó el primer sensor, dejando el sistema listo para volver a ser utilizado.
- A continuación se detalla el código utilizado para las bombillas de señalización:


Con todo esto, si hemos realizado el cableado correctamente, alimentado el variador, ya que requiere una alimentación de 230V monofásicos, y hemos pulsado el botón verde del variador para arrancarlo... deberíamos de tener todo en perfecto funcionamiento.