PRÁCTICA II
Configurar un intercambio de
información entre un PLC S7314 con CP342-5, actuando como maestro en una red
profibus, y dos esclavos, un autómata CPM1A, un módulo MURR de 8 entradas
digitales.
El sistema tendrá que realizar las
siguientes actuaciones.
- Programar un circuito marcha-paro para el funcionamiento de un motor:
- Módulo de entradas MURR
- E0 : Pulsador de paro.
- E1: Pulsador de marcha.
- Autómata Omron:
- 10.04: Motor
- Transferir información del Siemens al Omron:
- Al pulsar la entrada E3 del módulo de entradas se transferirán los bytes de marcas 10 y 11 del Siemens, al autómata Omron (evidentemente, estos bytes tendrán un contenido). La información se almacenará en el canal 20 del Omron.
ESCLAVOS
CPM1A
Se trata de un autómata Omron como en el práctica anterior al que también le hemos tenido que añadir un módulo para poder conectarlo como esclavo a una red profibus DP.
El módulo en cuestión es el CPM1A-PRT21

- Vemos a simple vista que pose el conector DB9 y los típicos leds de RUN y BF. Bajo la tapa superior nos encontramos con dos ruletas para seleccionar la dirección de red y un switch para elegir la configuración Intel o Motorola

- Incluso el fabricante nos da un explicación de para que sirve la configuración Intel o Motorola. Tambien se puede consultar mi práctica anterior donde esta explicado:

- Este PLC no permite la configuración de cuantos bytes de información queremos transmitir, por defecto puede enviar y recibir 2 bytes de datos.
- Este autómata recibe la información en el canal 2 y la envía por el canal 12.
MODULO MURR

Si levantamos este conector vemos que realmente si que tiene un conector DB9 donde va encajado este módulo, y al lado del conector tenemos las dos ruletas para asignarle la dirección de red:

- Este esclavo al tener 8 entradas digitales solo podrá enviar 1 Byte de datos a través de la red, no podrá recibir.
ESQUEMA DE TRANSMISIÓN ENTRE EQUIPOS

- Como en la práctica anterior al maestro se le ha asignado la dirección 2 (la primera disponible) y al resto de esclavos por orden de conexión se han ido asignando y configurando por HW la 3 y la 4.
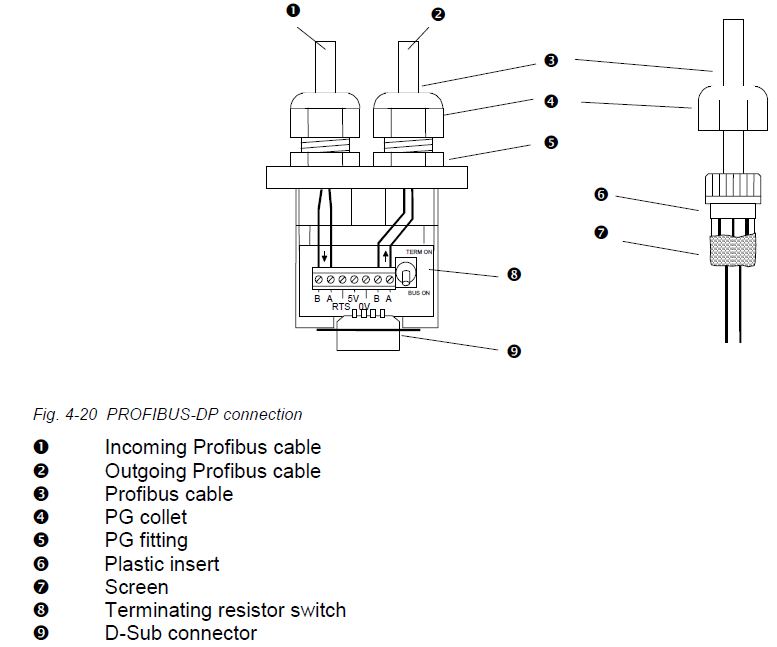
- Las resistencias de terminación de bus deberán estar a ON en los conectores del maestro y del módulo MURR, tal y como se ilustra en la figura siguiente:

FLUJO DE TRANSMISIÓN DE DATOS

DISTRIBUCIÓN DE DATOS EN LA MEMORIA DEL MAESTRO
Para esta práctica el módulo CP342-5 escribirá y leerá los datos en la siguiente área de memoria y con la siguiente distribución:

- Podemos apreciar como en este caso la distribución de la memoria no es simétrica ya que el módulo MURR es un dispositivo de 8 entradas digitales sin salidas, por lo que no se le pueden enviar datos, solo podemos recibir 1 Byte de información desde este esclavo.
- El PLC CPM1A en cambio puede enviar y recibir 2 Bytes de datos, sin que se quepa la posibilidad de aumentar o disminuir esta cantidad.
DESCRIPCIÓN DEL PROCESO DE COMUNICACIÓN
- El módulo MURR tiene conectados tres pulsadores en las tres primeras posiciones. La posición del primer pulsador corresponde al bit de menor peso dentro del Byte que se enviará por la red y el tercer pulsador tendrá la tercera posición, es decir:
- Si se actúa sobre el pulsador de paro del motor, que se ha asignado al pulsador conectado a la entrada B37.0 en el byte que el módulo envía contendrá: 00000001
- Si se actúa sobre el pulsador de marcha del motor, que se ha asignado al pulsador conectado a la entrada B37.1 en el byte que el módulo envía contendrá: 00000010
- Si se actúa sobre el pulsador de transferencia de información, que se ha asignado al pulsador conectado a la entrada B37.5 en el byte que el módulo envía contendrá: 00100000
Ahora que ya sabemos que información nos llega del módulo MURR y podemos leer en el MB4 tan solo hay que obra en función de que se activen los bits M4.0, M4.1 o M4.5:
- M4.0 se activa (contiene un 1)--> en este caso escribiremos en el MB0 un 2 que recibirá el CPM1A en el canal 2 y hará que pare el motor.
- M4.1 se activa (contiene un 1)--> en este caso escribiremos en el MB0 un 1 que recibirá el CPM1A en el canal 2 y hará que arranque el motor.
- M4.5 se activa (contiene un 1)--> en este caso el maestro sabe que debe de transferir la información de su MB10 y MB11 al canal 20 del Omron, con lo que escribira estos bytes en el MB0 Y MB1 respectivamente para que le lleguen al Omron que los recibirá en el canal 2 y posteriormente moverá a su canal 20.
CONFIGURACIÓN DEL MAESTRO S7-CPU314IFM
- Abriremos un nuevo proyecto donde configuraremos un equipo maestro como hicimos en la práctica anterior, consultar la entrada del blog "Profibus DP, Practica I" para más información. Nos paramos cuando ya tenemos configurado el Maestro con el módulo CP342-5 y la red Profibus creada:

- Lo que ahora cambia son los esclavos que vamos a utilizar, empezaremos por el CPM1A que lo podremos hallar en el menú lateral derecho en la entrada "Profibus_DP --> Otros aparatos de campo --> PLC". Con este PLC sólo hay que pinchar y arrastrar a la red ya que no permite opciones de configuración y le asignamos la dirección 3:

- En la tabla de abajo vemos como direcciones de entrada y salida tiene de la 0 a la 1, lo que quiere decir que puede enviar y recibir 2 Bytes, que al ser el 0 y el 1 concuerdan con los dos primeros bytes de la asignación de memoria para el envío y la recepción que son el MB0 y MB1 para el envío y el MB2 y MB3 para la recepción de información.

- Localizamos en el módulo MURR que es el MBV-P y lo arrastramos a la red y le asignamos la dirección 4.

- Vemos que el módulo tiene todos sus slots vacíos, eso es porque admite diferentes configuraciones, el nuestro es el de DI8, el de 8 entradas digitales, así que lo seleccionamos de la lista y lo arrastramos al slot 0.

- Ahora vemos que ya nos indica que puede enviar 1Byte y que ocupa la posición de la zona de memoria que el módulo CP recibe, lo que indica que deberemos ir a buscar la información al MB4.

- Una vez tenemos todo el hardware correctamente configurado vamos a crear el programa del maestro. Lo primero configurar la FC1 y FC2:

- Podemos observar como la dirección CPLADDR sigue siendo la misma que en la práctica anterior ya que el módulo CP342-5 lo hemos vuelto a colocar en el slot 4.
- Pero ahora solo enviamos 2 Bytes contando desde el M0.0 y recibimos 3 Bytes contando desde el M2.0.
EJERCICIO 1
- Para controlar el arranque y paro del motor se actuara sobre el pulsador de paro (B37.0) y pulsador de marcha (B37.1) alojados en el módulo MURR. El maestro recibirá que pulsadores han sido activados en la marca MB4 donde estarán a 1 los bits de los pulsadores activados y el programa mirará cuales se han activado y dará la orden de marcha o paro como se ha explicado anteriormente:

- Si se actúa sobre el pulsador de marcha se recibe en el MB4 la secuencia 00000010, por tanto el bit M4.1 estará a 1 y se activará la función MOVE, permitiendo que se coloque en la zona de envío al CPM1A (MB0) un 1 que se encargará de interpretar el esclavo.

- El CPM1A recibirá en el canal 2 la secuencia 0000000000000001 que se traduce en que el bit 2.00 esta activo, permitiendo que se active la salida 10.04 donde esta conectado el motor y este arrancará.

- Si se actúa sobre el pulsador de paro se recibe en el MB4 la secuencia 00000001, por tanto el bit M4.0 estará a 1 y se activará la función MOVE, permitiendo que se coloque en la zona de envío al CPM1A (MB0) un 2 que se encargará de interpretar el esclavo. Es importante que se encargue de interpretar el esclavo ya que cuanta mayor carga de trabajo podamos quitarle al maestro mejor, y además por eso se llama periferia distribuida.

- El CPM1A recibirá en el canal 2 la secuencia 0000000000000010 que se traduce en que el bit 2.01 esta activo, permitiendo que se desactive la salida 10.04 donde esta conectado el motor y por tanto este se parará.
EJERCICIO 2
- Para habilitar la transferencia de datos desde el esclavo al Omron simplemente debemos capturar la pulsación en el módulo MURR del pulsador B37.5

- De esta forma al recibir en MB4 la secuencia 00100000 indica que el M4.5 está activo, lo que permite que se realice la función de transferencia moviendo los bytes MB10 y MB11, agrupados en la palabra MW10, al PLC Omron a traves de los bytes MB0 y MB1 agrupados en la palabra MW0.

- El esclavo en cada ciclo de scan pasa lo que le llega en el canal 2, a traves de la red profibus, al canal 5, ya que el canal 20 como pide la práctica no es accesible en este modelo de PLC, por lo tanto usamos uno que este libre. Cuando se actúe sobre el pulsador de transferencia en el módulo MURR el maestro mandará la información contenida en su MW10 al esclavo y este la transferirá al canal 5.
Si esta todo correctamente cableado y no se producen errores de bus, la comunicación será continua y el programa realizará de forma automática todo lo indicado.
Muy bien nuevamente. Perfecto para seguir la práctica sin problemas. Muy bien nuevamente.
ResponderEliminarIron Man Iron Man Iron Man Metal-Piece Art - Titanium Arts
ResponderEliminarIron Man race tech titanium Iron titanium pans Man Metal-Piece babyliss pro nano titanium hair dryer Art - titanium 4000 Titanium columbia titanium jacket Arts